28. Object Detection
2023. 9. 16. 23:44ㆍGoogle ML Bootcamp/4. Convolutional Neural Networks
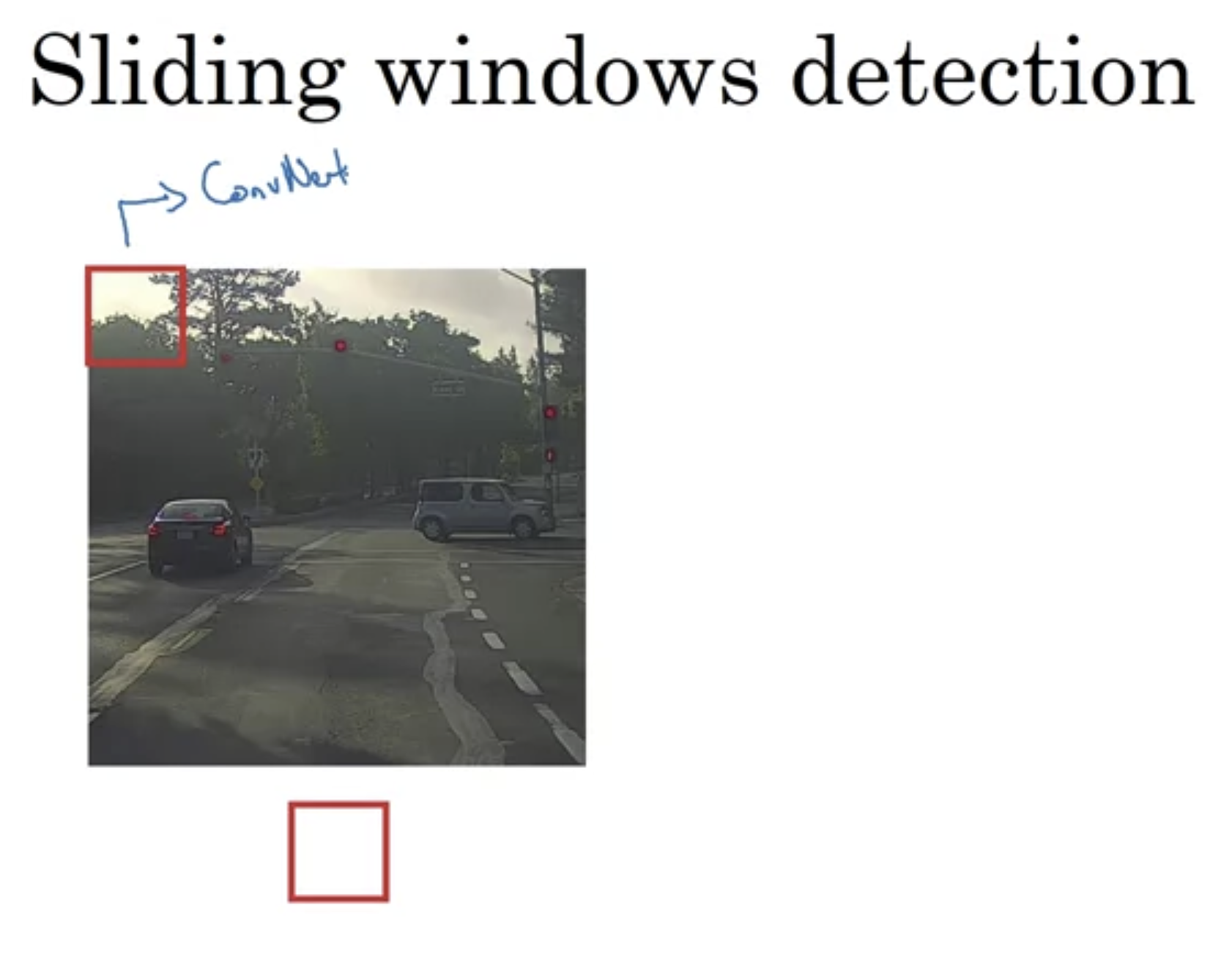
즉 stride 하면서 빨간박스 내에 차가 있냐 없냐로 기록.
- input 이 car image, output이 0 or 1 이였을 때 학습 시 차가 가운데 왔을 때 객체 탐지율이 높으므로 crop을 통해 비슷하게 환경을 조성

sliding and serveral box size cause high computation cost.
- every single step run by ConvNet (=deep neural network)
'Google ML Bootcamp > 4. Convolutional Neural Networks' 카테고리의 다른 글
| 30. Bounding Box Predictions (0) | 2023.09.17 |
|---|---|
| 29. Convolutional Implementation of Sliding Windows (0) | 2023.09.17 |
| 27. Landmark detection (0) | 2023.09.16 |
| 26. Object Localization (0) | 2023.09.16 |
| 25. State of Computer Vision (0) | 2023.09.16 |